Cooperation between AAU (Department of Mechanical engineering (ME) and Department of Electronic Department (ES)) and
RoboMop is launched. While ME will modify the non-controllable design to be controlable, our lab will focus on development of distributed algorithm of deformable formation and trilateration based planning and replanning. Our sensor board will be used for the research. Initiative of this cooperation is resulted in a EU project proposal that will be submitted to ECHORD.
Updated on April 24 2010!!!
Here are pictures of the modified RoboMop prototyping equipped with our sensor board.


Here is CAD model of the current Robomop

The sensor board is mounted on the steering platform
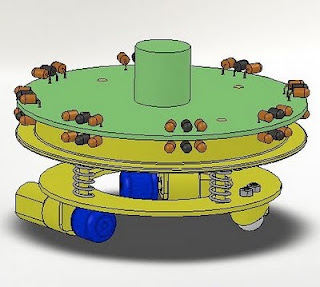
The CAD model of new robot prototype











No comments:
Post a Comment