Water puppetry is a Vietnamese art performance where puppets made of wood and lacquered perform on water. Characteristic of puppets are usually expressed through its face and motion controlled by the puppeteers who are hidden behind the screen. Performance of the puppets are very diverse as they can move, dance, dive, fly, and even breathe fire.
A play of water puppets reveals daily life of Vietnamese farmers reflecting the culture and spirits of Vietnamese people, the Red Delta River civilization.
Today I watched a VTV show named Cultures, Events and Personage about a story of the artist, Chu Luong. He is an artist of the water puppetry, whose life is for the art. He told about his passion of the water puppetry, the working condition of the puppeteers, the status of the water puppetry in Vietnam, impact of the water puppetry introducing Vietnamese culture to the world and of course his puppets. As he said, soul of the puppets is mostly expressed on its face. This information together with my awareness of the body motion of the water puppets seen in past triggered a crazy idea in my mind about how to embed robotics in the water puppets. As seen, the puppet is a rigid body with very few degree of freedom. I do not know why there are only few (I have to ask puppeteers), but I guess that the puppeteers can only control the puppets with a limited few degree of freedom, especially standing in water and hidden behind the screen. However, I strongly believe that the puppet with high degree of freedom in their body reveals more meaning through their body motion. The robotic technology embedded in the puppets might:
- issue more control degree for the puppeteers
- allow sophisticated motion of the puppets
- synchronize the puppets' degree of freedom along with the puppeteers control
- and if all the puppets are programmed to perform a play, the control role of the puppeteers is released and they can freely act as a DJ in musics to add their feeling to the performance stream.
One thing I am wondering is is I do no know whether this creative changes the traditional property of the water puppetry. But I know, it is definitely a crazy idea . Will see!
Saturday, 16 October 2010
Friday, 1 October 2010
Another accepted paper in Robio2010
We have another accepted paper in IEEE International Conference on Robotics and Biomimetics (Robio 2010). The paper is about quantitative analysis for selection of distributed control of robot swarm.
An accepted paper in DARS 2010
We have an accepted paper in the 10th International Symposium in Distributed Autonomous Robotics System (DARS 2010). Simon and (Rene maybe) will go to give a poster presentation in Lausanne, Switzerland. This paper will appear as a book chapter in Springer Tracts in Advanced Robotics Series.
Good news!
Good news!
Wednesday, 15 September 2010
Two new project proposals selected by 7th semester IAS student
- The first group will work with new robots for a project: "Dancing with robots". At the end, we expect that the robots will response to human body acting whist maintaining their attitude automatically (mainly heading synchronization in this project). Moreover, we expect that the swarm of robots will dance according to musical melodies played by human.
- The second group will work with a heterogeneous group of robots for a project: "A swam of Kangaroo robots". The project is about a marsupial robot (Kangaroo mother) loading and unloading their offspring giving advantages of fast deployment and withdraw for searching and rescue in hazard environment. The mothership will carry small robots and deploy them in an narrow area that the mother is not accessible. In this project, two research subjects of multi-query and cooperative control for loading and unloading offspring are emphasized.
- The second group will work with a heterogeneous group of robots for a project: "A swam of Kangaroo robots". The project is about a marsupial robot (Kangaroo mother) loading and unloading their offspring giving advantages of fast deployment and withdraw for searching and rescue in hazard environment. The mothership will carry small robots and deploy them in an narrow area that the mother is not accessible. In this project, two research subjects of multi-query and cooperative control for loading and unloading offspring are emphasized.
Saturday, 4 September 2010
Successful Master thesis defence
Congratulations to Simon Bjerg Mikkelsen who successfully defended his Master thesis in swarm formation.
He graduated with a very good mark. This result is as acknowledgment to his research contribution to swarm formation. During the thesis, he published two conference papers. This is exceptionally good result for a Master degree.
Once, congratulations to Simon and wish him a bright future!
He graduated with a very good mark. This result is as acknowledgment to his research contribution to swarm formation. During the thesis, he published two conference papers. This is exceptionally good result for a Master degree.
Once, congratulations to Simon and wish him a bright future!
Friday, 20 August 2010
A school of fish in NordAquarium, Denmark
I recorded this video when we visited NordAquarium, Denmark.
This is a good documentary for our interests of bio-inspired robotics.
This is a good documentary for our interests of bio-inspired robotics.
Tuesday, 6 July 2010
Probabilistic Potential Field for Robot Formation
We have succeeded in developing a new method of potential field for robot formation, called Probabilistic Potential Field (PPF). The approach is targeted on distributed control of robot swarm because the potential field is individually established by each robot. There are 3 major novelties of this approach different from previously developed methods:
1) The attractive and repulsive forces have been developed based on communication only, not including perception.
2) The potential field is a probabilitic function, not pre-assumed based on diffirential equations .
3) The probabilistic function has been developed based on empirical measure of the robots' communication
We sucessfully demonstrated that, a swarm of mobile robots can form and maintain hexagonal and square lattice. Impressingly, we can achieve the formation transition from square to hexagonal lattices without predetermination. The alternative is only obtained if the diagonal robots are fixed with their position in the formation.
This result is documented in an scientific paper and we hope to publish it very soon!
A realtime performance of hexagonal formation:
Square formation maintainance:
and
The formation transition from square to hexagon:
Browser our youtube for more video clips
http://www.youtube.com/user/TheMoreThanOne
1) The attractive and repulsive forces have been developed based on communication only, not including perception.
2) The potential field is a probabilitic function, not pre-assumed based on diffirential equations .
3) The probabilistic function has been developed based on empirical measure of the robots' communication
We sucessfully demonstrated that, a swarm of mobile robots can form and maintain hexagonal and square lattice. Impressingly, we can achieve the formation transition from square to hexagonal lattices without predetermination. The alternative is only obtained if the diagonal robots are fixed with their position in the formation.
This result is documented in an scientific paper and we hope to publish it very soon!
A realtime performance of hexagonal formation:
Square formation maintainance:
and
The formation transition from square to hexagon:
Browser our youtube for more video clips
http://www.youtube.com/user/TheMoreThanOne
Wednesday, 2 June 2010
New experiment of swarming aggregation on real robots
We have done some experiments to test algorithms of swarm aggregation. Basically, we would like to see how our robots can maintain their connectivities when we use probablistic directional communication as the attractive forces. We also manupulated the environment to observe how robots can search their swarm and how the swarm can gather their lost members.
The results are quite opministic!
The first experiment presents how three small scatted groups will cluster into united swarm.
The second experiment confirmed the robustness of swarm aggregation
The third experiment presents how robots can search their swarm and how they swarm can gather their lost members. To do that, we manipulated the environment during the experiment
The results are quite opministic!
The first experiment presents how three small scatted groups will cluster into united swarm.
The second experiment confirmed the robustness of swarm aggregation
The third experiment presents how robots can search their swarm and how they swarm can gather their lost members. To do that, we manipulated the environment during the experiment
EU proposal in FP7-ARGI : ICT-WAT
The lab participated in an EU proprosal in FP7-AGRI named "ICT-WAT: Information and Communicaton Technologies in Sustainable Water Resources Management in Argiculture". The project proposal is about using wireless sensor network to optimize the usage of the water on the field.
The partners are:
1. Agricultural Universtiy of Athens (AUA), Greece: Coordinator
2. Agricultural Research Council Research Unit (CRA-SCA), Italy.
3. Aalborg University, Denmark
4. EPSILON Italia SRL, Italy.
The total budget is about 300.000 Euro in which AAU will take 120.000 Euro
The partners are:
1. Agricultural Universtiy of Athens (AUA), Greece: Coordinator
2. Agricultural Research Council Research Unit (CRA-SCA), Italy.
3. Aalborg University, Denmark
4. EPSILON Italia SRL, Italy.
The total budget is about 300.000 Euro in which AAU will take 120.000 Euro
Tuesday, 4 May 2010
Simulation platform (updated)
We developed a simulation platform for our robot swarm. The impressive characteristics of this platform consists of:
1. Robot: Physics-based model. Instead of using unicycle or point mass robot model, we developed a physics-based model that illustrates how the real robots act in the environment. Furthermore, we developed a sensor model for infrared beam to ensure that the robot can only communicate with other robots and detect objects if they are within their sensing and communication beam. This model is much more realistic to the robot design than many existing sensor models.
2. Control: Adaptive PID control. The control is developed to clarify how we control the real robots using adaptive PID control. This control can be selectively applied or not.
3. Swarming algorithms: 3 branches of swarm algorithms developed for simulation
a) Directional signal based swarm: The algorithm is based on directional signal. Using the algorithm, a robot will react to the first signal it perceives.
b) Signal intensity based swarm: The algorithm is based on signal intensity. Applying this algorithm, a robot will react to the signal intensity of its neighbours. There are two versions developed in the platform
c) Neural network based swarm: The algorithm is based on a signal processing of sensory inputs using a neural network. There are two versions developed in the platform
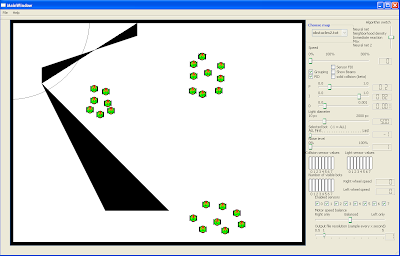
Here is the screenshot of this software platform.
A brief desciption of the functions of this platform:
- Number of robots can be added unlimitedly
- Five different algorithms are switched online
- The scenario can be pre-arranged with a set of user-defined obstacles
- The speed of robots can be online adjusted at all or on individual robots
- Functions of grouping and PID control can be online selected
- Kp, Ki, Kd of PID can be adjustable online
- Sensor beam of all robots or individual can be show on or off
- Noise to sensory reading is adjustable.
- Values of each sensor on the robots are visible
- Number of neighbouring robots are realtime checked and visibly shown.
- The sensor beam can be activated or disactivated online.
- The speed balance of diffirential motors are adjustable.
- Light source diameter is adjustable and blind pot between robots under light conditions are implemented
- Output of simulation in terms of robots' position and orientation are saved in plain text for post-process
The first video clip of our simulation platform (consisting of a only)
The second video clip of our simulation platform (consisting of a,b,c)
1. Robot: Physics-based model. Instead of using unicycle or point mass robot model, we developed a physics-based model that illustrates how the real robots act in the environment. Furthermore, we developed a sensor model for infrared beam to ensure that the robot can only communicate with other robots and detect objects if they are within their sensing and communication beam. This model is much more realistic to the robot design than many existing sensor models.
2. Control: Adaptive PID control. The control is developed to clarify how we control the real robots using adaptive PID control. This control can be selectively applied or not.
3. Swarming algorithms: 3 branches of swarm algorithms developed for simulation
a) Directional signal based swarm: The algorithm is based on directional signal. Using the algorithm, a robot will react to the first signal it perceives.
b) Signal intensity based swarm: The algorithm is based on signal intensity. Applying this algorithm, a robot will react to the signal intensity of its neighbours. There are two versions developed in the platform
c) Neural network based swarm: The algorithm is based on a signal processing of sensory inputs using a neural network. There are two versions developed in the platform

Here is the screenshot of this software platform.
A brief desciption of the functions of this platform:
- Number of robots can be added unlimitedly
- Five different algorithms are switched online
- The scenario can be pre-arranged with a set of user-defined obstacles
- The speed of robots can be online adjusted at all or on individual robots
- Functions of grouping and PID control can be online selected
- Kp, Ki, Kd of PID can be adjustable online
- Sensor beam of all robots or individual can be show on or off
- Noise to sensory reading is adjustable.
- Values of each sensor on the robots are visible
- Number of neighbouring robots are realtime checked and visibly shown.
- The sensor beam can be activated or disactivated online.
- The speed balance of diffirential motors are adjustable.
- Light source diameter is adjustable and blind pot between robots under light conditions are implemented
- Output of simulation in terms of robots' position and orientation are saved in plain text for post-process
The first video clip of our simulation platform (consisting of a only)
The second video clip of our simulation platform (consisting of a,b,c)
Swarm algorithms: Simulation and Real Implementation
One group of the lab has developed swarming behaviors based on neutral network. The algorithm is one of three algorithms they have developed their semester thesis: (1)directional signal based swarm, (2) signal intensity based swarm, and (3) neural network based swarm.
They developed algorithms on Simulation platform using Visual C++ and implemented the algorithms on our small-scale robots.
Here is one of video clip of Neural network based robot swarm
They developed algorithms on Simulation platform using Visual C++ and implemented the algorithms on our small-scale robots.
Here is one of video clip of Neural network based robot swarm
Friday, 30 April 2010
EU proposal in ICT-FP7: ACSwarm
The lab submitted mini-EU proposal named ACSwarm: Swarm of Afforable Robots for multi-model clearning. The project is conducted on the cooperation of AAU Dept. Electronics Systems, Automation and Control (principal investigator), AAU Dept. Mechanical Engineering (project coordinator), RoboMop International A/S (industrial partners and equipment provider).
The project is about using swarm of afforable robots for concurrently wet-dry cleaning.
A summary of this project proposal can be seen below:
"Mobile robotic systems nowadays have potential to take place of human workers in domestic or professional working environments for saving time and cost. However, the widespread use of mobile robots has not come yet. A major barrier is the low performance/price ratio (P2R), which implies a low profit or level of satisfaction against the high investment. Technology that is able to improve the P2R of robots is pressingly demanded.
This project is concerned with the swarm technology of affordable cleaning robots in floor cleanings. The objective is to enable a swarm of affordable cleaning robots to work collaboratively with multiple modes, including wet and dry mopping. The swarm will improve cleaning performance and increase the flexibility to deal with different situations, thus lead to increased P2R for cleaning robot products.
In this project, experiments will be conducted with a swarm of low-cost cleaning robots, namely, RoboMop (€25), with an aim to upgrade this affordable robot to be highly controllable and flexible for a variety of cleaning purposes. The robot will be modified and modelled for the swarm control. A new approach to regulate robots in swarm to work adaptively and flexibly will be experimentally studied. The swarm algorithm, sensing and communication method, the plug & play deployment of a swarm will be tested in the experiments. The results of the experiments are expected to further the state-of-the-art of swarm robotics, particularly, the application of swarm robotics in the physical functions in the real world."
The total budget is 310.000 Euro in which AAU Automation and Control will take 150.000 Euro
The project is about using swarm of afforable robots for concurrently wet-dry cleaning.
A summary of this project proposal can be seen below:
"Mobile robotic systems nowadays have potential to take place of human workers in domestic or professional working environments for saving time and cost. However, the widespread use of mobile robots has not come yet. A major barrier is the low performance/price ratio (P2R), which implies a low profit or level of satisfaction against the high investment. Technology that is able to improve the P2R of robots is pressingly demanded.
This project is concerned with the swarm technology of affordable cleaning robots in floor cleanings. The objective is to enable a swarm of affordable cleaning robots to work collaboratively with multiple modes, including wet and dry mopping. The swarm will improve cleaning performance and increase the flexibility to deal with different situations, thus lead to increased P2R for cleaning robot products.
In this project, experiments will be conducted with a swarm of low-cost cleaning robots, namely, RoboMop (€25), with an aim to upgrade this affordable robot to be highly controllable and flexible for a variety of cleaning purposes. The robot will be modified and modelled for the swarm control. A new approach to regulate robots in swarm to work adaptively and flexibly will be experimentally studied. The swarm algorithm, sensing and communication method, the plug & play deployment of a swarm will be tested in the experiments. The results of the experiments are expected to further the state-of-the-art of swarm robotics, particularly, the application of swarm robotics in the physical functions in the real world."
The total budget is 310.000 Euro in which AAU Automation and Control will take 150.000 Euro
Wednesday, 21 April 2010
AAU and RoboMop cooperation
Cooperation between AAU (Department of Mechanical engineering (ME) and Department of Electronic Department (ES)) and RoboMop is launched. While ME will modify the non-controllable design to be controlable, our lab will focus on development of distributed algorithm of deformable formation and trilateration based planning and replanning. Our sensor board will be used for the research. Initiative of this cooperation is resulted in a EU project proposal that will be submitted to ECHORD.
Updated on April 24 2010!!!
Here are pictures of the modified RoboMop prototyping equipped with our sensor board.


Here is CAD model of the current Robomop

The sensor board is mounted on the steering platform
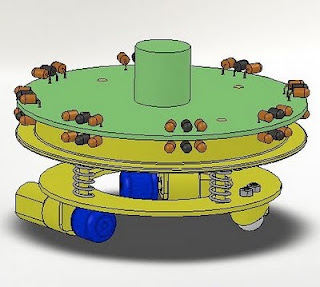
The CAD model of new robot prototype

Updated on April 24 2010!!!
Here are pictures of the modified RoboMop prototyping equipped with our sensor board.


Here is CAD model of the current Robomop

The sensor board is mounted on the steering platform

The CAD model of new robot prototype

Tuesday, 20 April 2010
New small-scaled robot platform developed in the lab
We developed a new small-scaled robot platforms for our real experiments in swarm formation. The new platform has very high speed that are required to demonstrate the distributed algorithm of robot formation.
The control architecture of this platform is very powerful, including 2 IR sensor and communication boards and 1 RF and Bluetooth wireless communication. Inter-connection between the boards is conducted via I2C.
More information of our test and picture of this platform will be posted latter
Updated on 26 April 2010
Here is our mock-up of this robot platform.


and our "assembly" expert.

The control architecture of this platform is very powerful, including 2 IR sensor and communication boards and 1 RF and Bluetooth wireless communication. Inter-connection between the boards is conducted via I2C.
More information of our test and picture of this platform will be posted latter
Updated on 26 April 2010
Here is our mock-up of this robot platform.


and our "assembly" expert.

Subscribe to:
Posts (Atom)